The name bremsstrahlung comes from German. The literal translation is ‘braking radiation’. From classical theory, when a charged particle is accelerated or decelerated, it must radiate energy.
The bremsstrahlung is possible interactions of light-charged particles with matter (especially with high atomic numbers).
The two commonest occurrences of bremsstrahlung are by:
- Deceleration of charged particle. When charged particles enter a material, they are decelerated by the electric field of the atomic nuclei and atomic electrons.
- Acceleration of charged particles. When ultra-relativistic charged particles move through magnetic fields, they are forced to move along a curved path. Since their direction of motion is continually changing, they are also accelerating and so emit bremsstrahlung. In this case, it is referred to as synchrotron radiation.
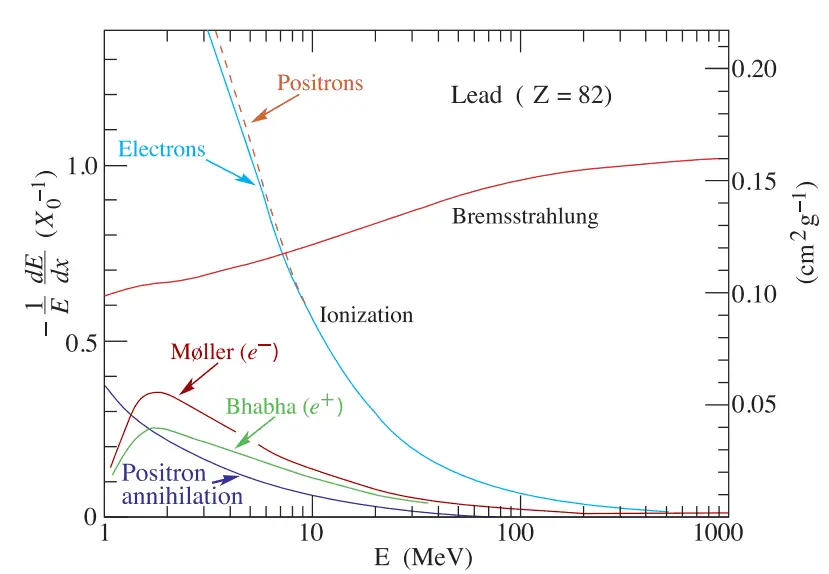
function of electron or positron energy. Source: http://pdg.lbl.gov/
Since the bremsstrahlung is much stronger for lighter particles, this effect is more important for beta particles than protons, alpha particles, and heavy charged nuclei (fission fragments). This effect can be neglected at particle energies below 1 MeV because the energy loss due to bremsstrahlung is very small. Radiation loss starts to become important only at particle energies well above the minimum ionization energy. At relativistic energies, the ratio of loss rate by bremsstrahlung to loss rate by ionization is approximately proportional to the product of the particle’s kinetic energy and the atomic number of the absorber.
The cross-section of bremsstrahlung depends on mostly these terms:

So the ratio of stopping powers of bremsstrahlung and ionization losses is:
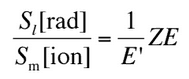
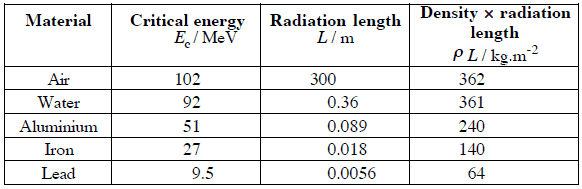
Where E is the particle’s (electron’s) kinetic energy, Z is the mean atomic number of the material, and E’ is a proportionality constant; E’ ≈ 800 MeV. The kinetic energy at which energy loss by bremsstrahlung is equal to the energy loss by ionization and excitation (collisional losses) is called the critical energy. Another parameter is the radiation length, defined as the distance over which the incident electron’s energy is reduced by a factor of 1/e (0.37) due to radiation losses alone. The following table gives some typical values: